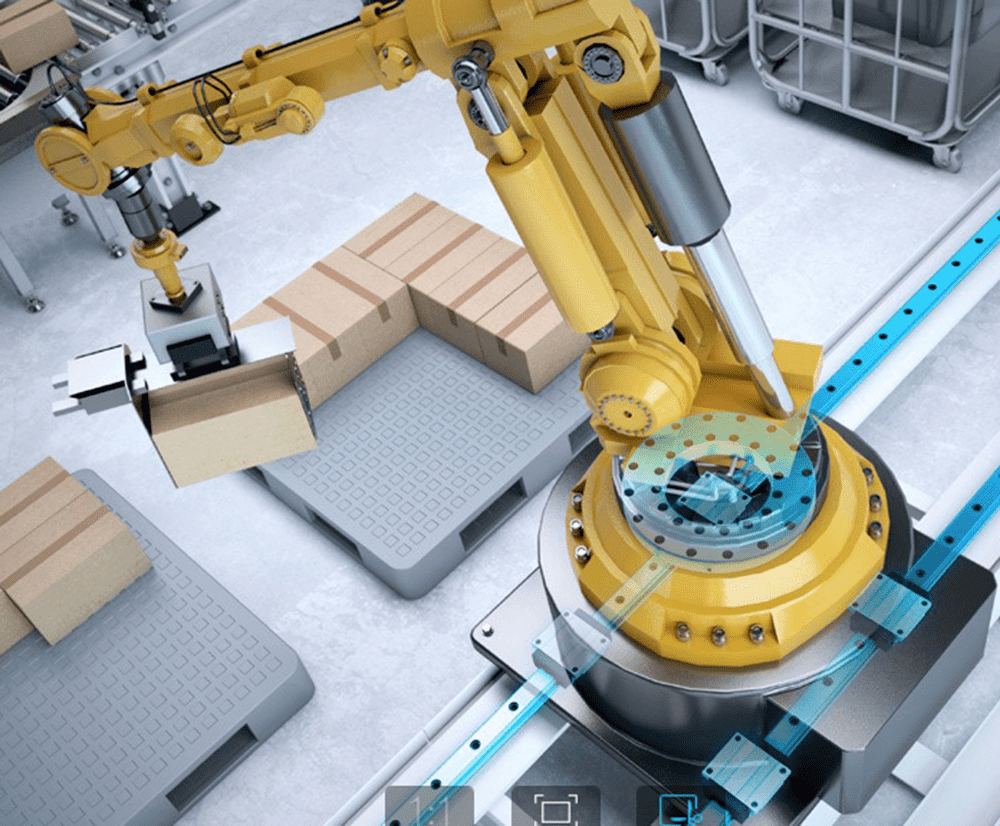
استفاده گسترده از روبات های صنعتی در کارخانه های خودکار ، راندمان تولید را به میزان قابل توجهی بهبود بخشیده است. مکانیسم اصلی یک ربات صنعتی یک بازوی مکانیکی است. طراحی ساختاری چند درجه از آزادی اجازه می دهد تا بازوی رباتیک از انعطاف پذیری بسیار بالایی برخوردار باشد. این می تواند به طور دقیق نقاط را پیدا کند و مطابق یک مسیر معین در فضا حرکت کند. مکانیسم چرخشی بازوی مکانیکی در حال حاضر از یک سیلندر هیدرولیک دوار یا موتور سرو برای تحقق عمل چرخشی با استفاده از a استفاده می کندبلبرینگ حلقه ای.
بلبرینگهمچنین به عنوان شناخته می شودبلبرینگ حلقه ای,بلبرینگ تورنت. این حاوی حلقه بیرونی ، حلقه داخلی ، بدنه نورد ، مهر و موم است. مواد محصولات ما به طور کلی فولادهای آلیاژ ساختاری مانند 42Crmo ، 50mn هستند.چرمیحلقهتحملمی تواند به طور عادی در دمای -30 ℃ تا +70 ℃ کار کند ، و ما می توانیم نوع خاصی را به عنوان نیاز مشتری طراحی کنیم.
بلبرینگ حلقه اینقش مهمی در توسعه روبات های صنعتی ایفا می کند ، بنابراین به طور گسترده ای به عنوان "مفصل دستگاه" شناخته می شود. روبات های صنعتی به طور گسترده در کارگاه های تولیدی مورد استفاده قرار می گیرند. با توجه به نیاز آنها ، روبات های مدرن صنعتی دارای حلقه های حلقه ای متداول هستند که به طور کلی از آنها استفاده می کنندغلتکبلبرینگ حلقه ای. Xuzhou Wandaشرکت بلبرینگ Slewing ، Ltdدارای سری مدل 11 ازبلبرینگ حلقه ایمی تواند این استفاده را برآورده کند.

زمان پست: مه -11-2020